Silnik krokowy stanowi jeden z kluczowych elementów wielu urządzeń i maszyn, umożliwiając precyzyjne sterowanie ruchem obrotowym w małych krokach. Dzięki unikalnej konstrukcji oraz możliwości podziału pełnego obrotu na wiele mniejszych jednostek, silnik ten znajduje szerokie zastosowanie tam, gdzie wymagana jest wysoka precyzja oraz powtarzalność ruchu. Poniższy artykuł omawia budowę, zasady działania, metody sterowania oraz praktyczne aplikacje silników krokowych.
Budowa i zasada działania
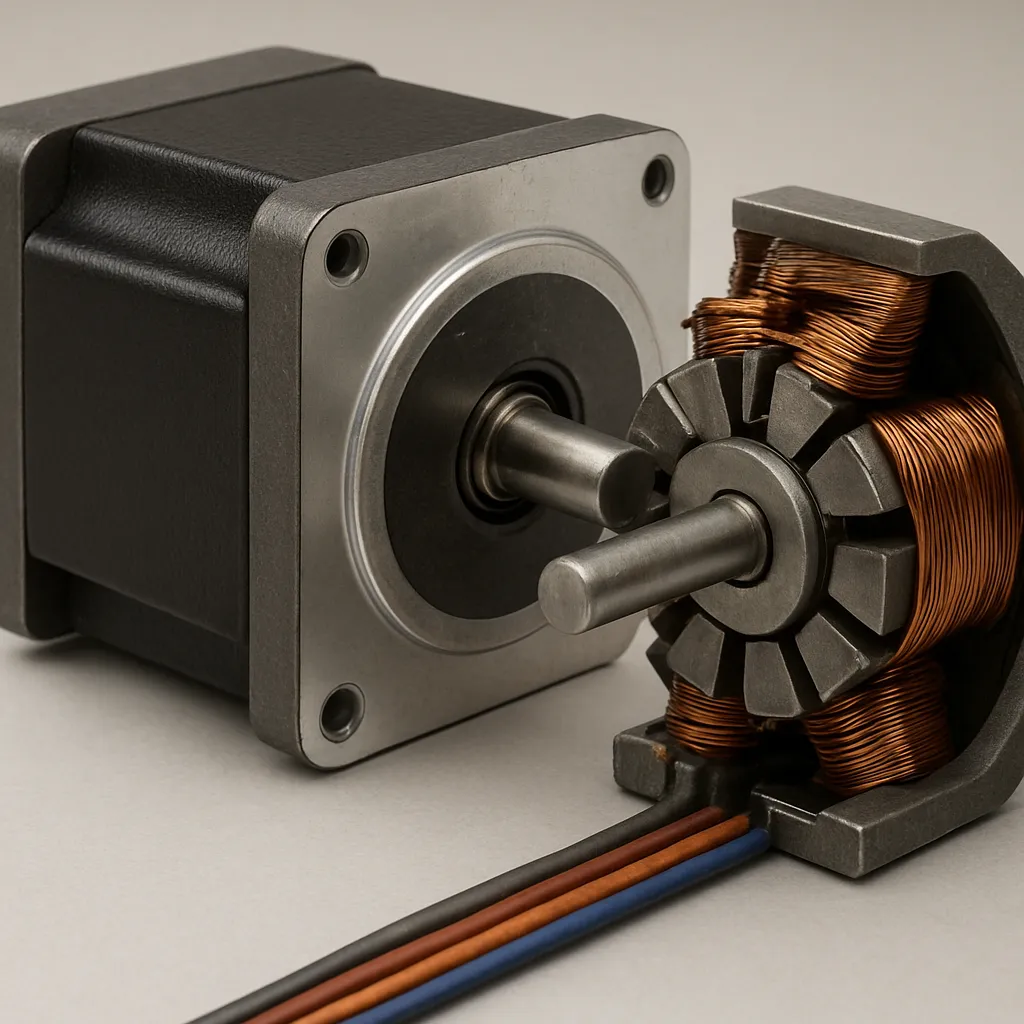
Podstawowym elementem silnika krokowego są uzwojenia statora oraz rotor z magnesami trwałymi lub zębatą konstrukcją. Każde uzwojenie może być zasilane w określonej kolejności, co powoduje wytworzenie pola magnetycznego przemieszczającego rotor o ściśle określony krok. Cały mechanizm opiera się na cyklicznym przełączaniu prądów w uzwojeniach, a dzięki temu osiągana jest wysoka powtarzalność położeń.
- Konstrukcja dwufazowa – dwie pary cewek, naprzemiennie załączane.
- Konstrukcja trifazowa – trzy pary cewek dla płynniejszego ruchu.
- Rodzaj magnesów – magnesy ferrytowe lub neodymowe wpływające na siłę pola.
- Rodzaj kroków – pełny krok, półkrok oraz mikrokrok.
W trybie pełnego kroku rotor przemieszcza się o stały kąt (np. 1,8° lub 0,9°). Wariant półkrokowy polega na częściowym zasilaniu cewek, co zwiększa liczbę pozycji do 400 lub 800 na pełny obrót. Natomiast mikrokrok dzieli każdy półkrok na kilkanaście lub kilkadziesiąt mniejszych fragmentów, co znacząco poprawia płynność obrotów oraz redukuje drgania.
Sterowanie i rodzaje sterowników
Kluczowym elementem pozwalającym wykorzystać pełny potencjał silnika krokowego jest odpowiedni sterownik. Urządzenie to generuje sygnały sterujące sekwencyjnym zasilaniem cewek, dbając jednocześnie o ochronę przed przeciążeniem i nadmiernym poborem prądu. Wyróżniamy kilka podstawowych trybów sterowania:
- Unipolarny – niższy moment obrotowy, prostsza konstrukcja z podziałem uzwojeń.
- Bipolarny – wyższy moment obrotowy, wymaga mostków H do odwracania kierunku prądu.
- Microstepping – precyzyjne dzielenie kroków na mniejsze jednostki.
Nowoczesne sterowniki często oferują funkcje automatycznej kalibracji, detekcji pozycji oraz synchronizacji z sygnałami wejściowymi, co zwiększa stabilność pracy oraz komfort integracji z wyższymi warstwami systemu sterowania CNC czy robotyki.
Zastosowania i korzyści
Ze względu na powtarzalność i dokładność, silniki krokowe znalazły swoje miejsce w wielu gałęziach przemysłu oraz elektroniki użytkowej. Do najpopularniejszych obszarów można zaliczyć:
- Drukarki 3D i plotery.
- Maszyny CNC.
- Automatyka przemysłowa: podajniki, taśmy transportujące.
- Robotyka edukacyjna i przemysłowa.
- Systemy pomiarowe i skanery.
Dzięki wysokiemu momentowi rozruchowemu nawet przy niskich prędkościach, silnik krokowy zapewnia doskonałą kontrolę położenia bez konieczności stosowania sprzężenia zwrotnego. W porównaniu z serwomotorami wyróżnia się niższą ceną oraz prostszym systemem sterowania, choć kosztem maksymalnej prędkości i sprawności.
Wyzwania i perspektywy rozwoju
Mimo licznych zalet, silniki krokowe napotykają na pewne ograniczenia. Typowe problemy to rezonanse mechaniczne, generowane wibracje oraz utrata kroków przy gwałtownych zmianach obciążenia. Aby je minimalizować, stosuje się:
- Systemy tłumienia rezonansów.
- Zaawansowane algorytmy sterowników adaptacyjne.
- Zastosowanie stabilnośći temperaturowej w uzwojeniach.
Rozwój technologii materiałowych oraz elektroniki mocy otwiera nowe możliwości dla silników krokowych. Współczesne badania skupiają się na zwiększeniu gęstości strumienia magnetycznego, redukcji strat w rdzeniach i bardziej efektywnym chłodzeniu. Ponadto coraz więcej uwagi poświęca się integracji z systemami IoT, co pozwoli na przewidywanie awarii i optymalizację pracy w czasie rzeczywistym.