W nowoczesnej automatyce przemysłowej zastosowanie czujników siły i momentu w ramieniu robota znacząco podnosi efektywność procesów produkcyjnych. Dzięki nim możliwe jest monitorowanie obciążeń, wykrywanie kolizji oraz realizacja zadań wymagających wysokiej precyzji. W artykule omówione zostaną zasady działania, budowa, metody przetwarzania sygnału oraz przykłady wykorzystania w branży robotycznej.
Zasada działania czujnika siły i momentu
Podstawowe pojęcia
Czujnik siły i momentu to urządzenie, które mierzy składowe sił oraz momentów działających na narzędzie robota w sześciu stopniach swobody. Wyróżniamy trzy osie translacji (Fx, Fy, Fz) oraz trzy osie rotacji (Mx, My, Mz). Pomiary są realizowane w czasie rzeczywistym, co pozwala na dynamiczną kontrolę procesu.
Mechanizm tensometrów
Kluczowym elementem jest wiązka tensometryczna pokryta cienką warstwą siłomierzy (strain gauges). Zmiana odkształcenia metalowej struktury powoduje zmianę rezystancji tensometru. W praktyce stosuje się mostki Wheatstone’a do pomiaru niewielkich różnic oporu. Wykorzystanie kilku mostków umożliwia niezależne odczytanie sił i momentów w każdej osi.
- Strain gauge – czujnik zmiany rezystancji.
- Mostek Wheatstone’a – układ pomiarowy.
- Elastyczna wiązka nośna – element przenoszący obciążenia.
Budowa i komponenty
Obudowa i materiały
Obudowa czujnika wykonana jest z wytrzymałych stopów aluminium lub stali nierdzewnej, chroniących elementy pomiarowe przed czynnikami zewnętrznymi. Ważna jest hermetyzacja, co zapewnia odporność na pyły, wilgoć czy wibracje.
Układ elektroniczny
Wnętrze zawiera płytkę PCB z układami wzmacniaczy sygnału, filtrami antyaliasingowymi oraz przetwornikiem analogowo-cyfrowym. Sygnał z mostków jest najbardziej narażony na zakłócenia, dlatego konieczne jest zastosowanie wzmacniaczy o niskim współczynniku szumów oraz staranne ekranowanie przewodów.
- Wzmacniacz pomiarowy – zwiększa amplitudę sygnału.
- Filtr dolnoprzepustowy – eliminuje zakłócenia wysokoczęstotliwościowe.
- Przetwornik ADC – konwersja sygnału analogowego na postać cyfrową.
- Interfejs komunikacyjny – protokoły CAN, Ethernet, RS-485.
Przetwarzanie sygnału i kalibracja
Kondycjonowanie sygnału
Proces kondycjonowania obejmuje wzmocnienie, filtrację oraz kompensację temperaturową. Kompensacja jest niezbędna, ponieważ zmiany temperatury wpływają na rezystancję tensometrów. W wielu rozwiązaniach stosuje się dodatkowe czujniki temperatury zintegrowane wokół mostków pomiarowych.
Procedura kalibracji
Kalibracja to etap, w którym czujnik jest obciążany znanymi wartościami sił i momentów. Pozwala to określić współczynniki przeliczeniowe oraz wyrównać różnice między poszczególnymi kanałami. Kalibracja może być przeprowadzana:
- Fabrycznie – w warunkach laboratoryjnych z użyciem precyzyjnych siłomierzy.
- Użytkownika – w miejscu instalacji robota z wykorzystaniem sprawdzonych wzorców.
Dzięki kalibracji uzyskuje się dokładność pomiaru sięgającą nawet 0,05 % zakresu pomiarowego.
Zastosowania w robotyce
Automatyka montażu
W zadaniach montażowych robot wykorzystuje czujnik siły do kontrolowanego wkręcania elementów, co zapobiega uszkodzeniu gwintów czy części. Pomiar siły osiowej umożliwia detekcję momentu, w którym połączenie jest prawidłowo dokręcone.
Wykrywanie kolizji i bezpieczeństwo pracy
Integracja czujnika siły i momentu z systemami sterowania pozwala na natychmiastowe zatrzymanie ruchu w razie wystąpienia nieoczekiwanego obciążenia. Wpływa to bezpośrednio na bezpieczeństwo obsługi maszyn oraz zapobiega uszkodzeniom drogiego oprzyrządowania.
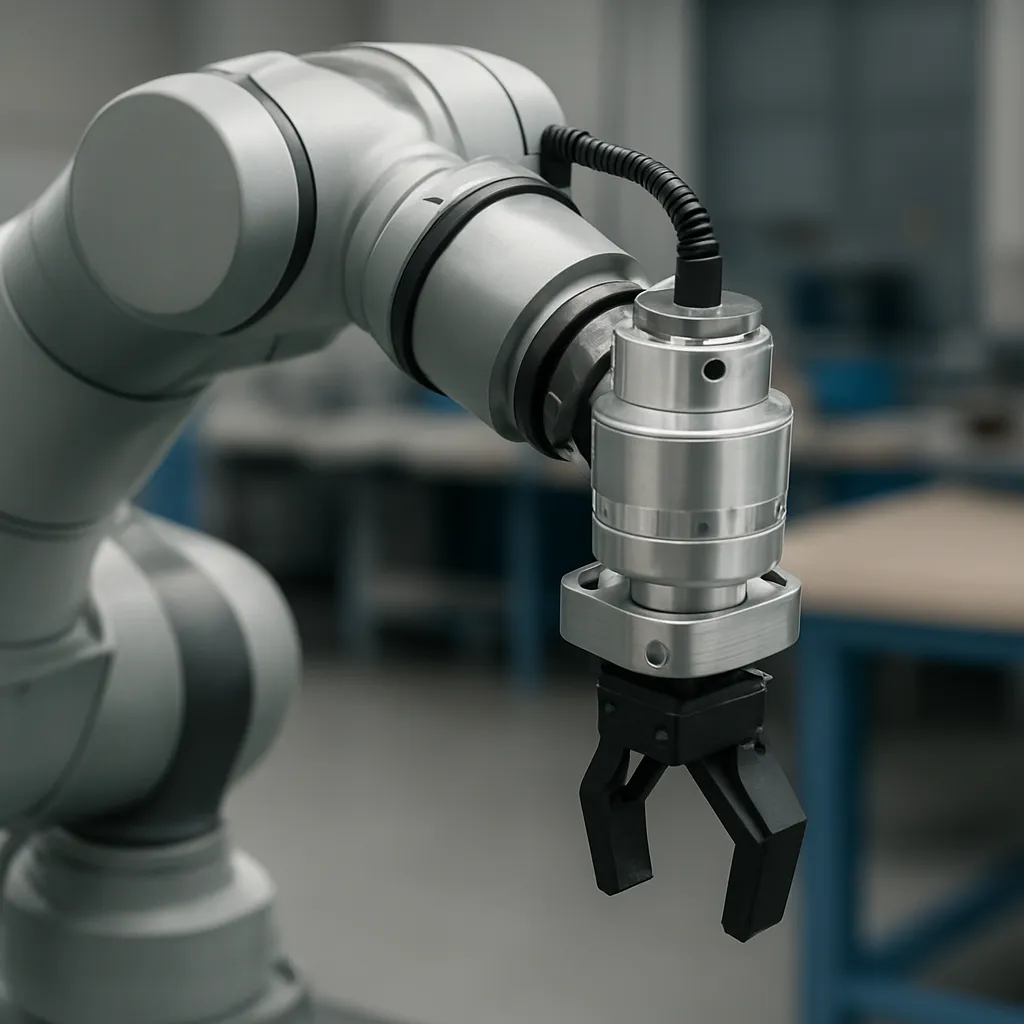
Interakcja człowiek-robot
W cobotach czujniki siły i momentu umożliwiają płynną współpracę z operatorem. Robot reguluje siłę chwytu i dostosowuje siłę działania ramienia, dzięki czemu może wykonywać delikatne operacje chirurgiczne lub prace laboratoryjne.
Przyszłe kierunki rozwoju
Badania nad nowymi materiałami tensometrycznymi, takimi jak nanowarstwy grafenowe, mogą pozwolić na dalszą miniaturyzację i zwiększenie czułości czujników. Równocześnie rozwój algorytmów sztucznej inteligencji będzie wspierał bardziej zaawansowane przetwarzanie sygnału i automatyczną adaptację parametrów pracy w zmiennych warunkach. W efekcie technologie te jeszcze bardziej zwiększą możliwości precyzyjnego sterowania robotami i otworzą nowe obszary zastosowań w medycynie, elektronice i motoryzacji.