Robot kartezjański to rodzaj manipulatora przemysłowego opierającego się na prostych, liniowych ruchach w układzie kartezjańskim. Jego konstrukcja uwzględnia osie X, Y i Z, co pozwala na precyzyjne przemieszczanie narzędzia lub chwytaka w trójwymiarowej przestrzeni. Z uwagi na swoją mechanikę i uniwersalność, roboty kartezjańskie znajdują szerokie zastosowanie w automatyce przemysłowej, laboratoriach badawczych oraz w rozwiązaniach laboratoryjnych. Poniżej przedstawiono szczegółowe omówienie ich działania, budowy oraz kluczowych obszarów wykorzystania.
Co to jest robot kartezjański
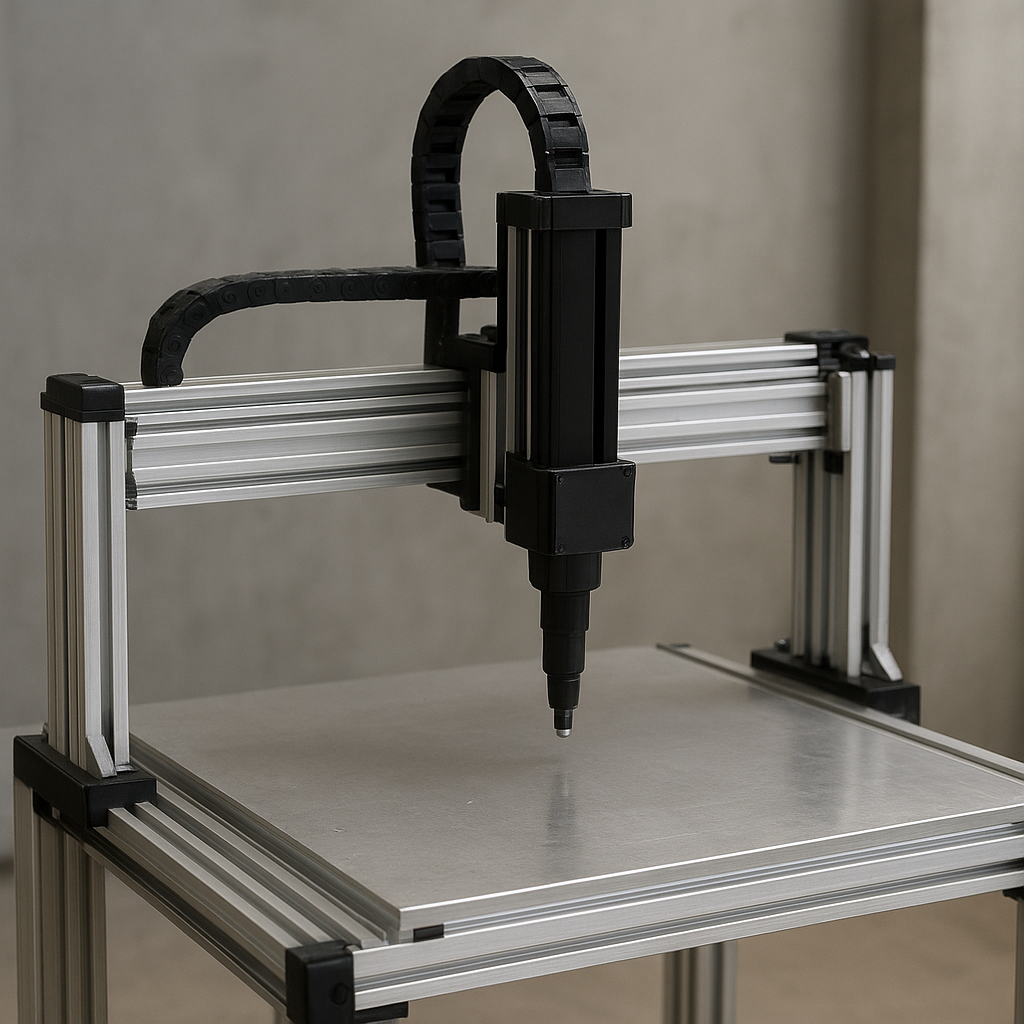
Manipulatory kartezjańskie są skonstruowane z trzech prostopadłych osi, po których poruszają się elementy wykonawcze. Każda oś wyposażona jest w prowadnicę liniową oraz napęd (np. siłownik elektryczny lub pneumatyczny), co umożliwia stabilne i powtarzalne ruchy. W przeciwieństwie do robotów przegubowych, które opierają się na obrotowych połączeniach, roboty kartezjańskie poruszają się wyłącznie po prostoliniowych torach, co upraszcza sterowanie i zmniejsza koszty konserwacji. Ich modularność daje możliwość łatwego dopasowania do różnych wymiarów obszaru roboczego.
Budowa i główne komponenty
Każdy robot kartezjański składa się z zestawu podstawowych elementów:
- Rama – stabilna konstrukcja nośna, na której montowane są prowadnice oraz silniki.
- Prowadnice liniowe – zapewniają precyzyjny ruch wzdłuż zadanych osi.
- Napędy – silniki krokowe lub serwomotory, często wyposażone w enkodery do kontroli precyzji pozycji.
- Chwytak lub narzędzie – element wykonawczy dostosowany do konkretnego procesu, np. chwytający detale, spawający lub klejący.
- Sterownik PLC lub komputer przemysłowy – zarządza sekwencją ruchów, odczytem czujników oraz komunikacją z systemem nadrzędnym.
- Czujniki krańcowe – wyznaczają granice obszaru pracy i zabezpieczają przed kolizjami.
Dzięki modułowej budowie można rozbudowywać układ o dodatkowe osie lub elementy peryferyjne, takie jak stacje wizyjne, podajniki czy stacje pomiarowe. To czyni je bardzo elastycznym narzędziem w automatyce.
Rodzaje i konfiguracje robotów kartezjańskich
W zależności od liczby osi oraz dodatkowych stopni swobody wyróżnia się:
- Roboty 3-osiowe – podstawowa konfiguracja realizująca ruchy w płaszczyznach X, Y i Z.
- Roboty 4-osiowe – rozszerzone o ruch obrotowy wokół jednej z osi (np. obrotnica chwytaka).
- Roboty 5- i 6-osiowe – umożliwiają precyzyjne ustawienie narzędzia w orientacji przestrzennej, ale przystosowane są zwykle do bardziej wyspecjalizowanych zadań.
Przykład rozbudowy o dodatkową oś obrotową
Dodanie osi obrotowej (anta) pod narzędziem pozwala na zmianę orientacji detalu podczas przenoszenia, co jest kluczowe np. w zautomatyzowanym montażu lub w procesie pakowania.
Zastosowania w przemyśle i badaniach
Roboty kartezjańskie zyskały popularność tam, gdzie wymagana jest wysoka powtarzalność i prędkość operacji. Kluczowe obszary zastosowań to:
- Pick and place – szybkie sortowanie i układanie elementów na liniach montażowych.
- Sterowanie dozowaniem i nakładaniem klejów czy farb.
- Zgrzewanie i spawanie impulsem, zwłaszcza w przemyśle motoryzacyjnym.
- Testy elektroniczne – automatyczne umieszczanie płytek PCB w testerach.
- Packing – precyzyjne układanie produktów w opakowaniach.
- Laboratoria – manipulacja probówkami, pipetowanie oraz obsługa aparatów analitycznych.
W zakładach przemysłowych robot kartezjański może pracować w tandemie z robotami wieloosiowymi lub stacjami kontroli jakości, tworząc w pełni zautomatyzowaną linię produkcyjną.
Zalety i ograniczenia
Do najważniejszych zalet robotów kartezjańskich należą:
- Prostota konstrukcji – ograniczona liczba części ruchomych.
- Elastyczność – łatwe dostosowanie rozmiaru obszaru roboczego.
- Dokładność i powtarzalność – precyzyjne prowadnice liniowe.
- Wysoka prędkość przemieszczania – brak skomplikowanych mechanizmów przegubowych.
- Relatywnie niski koszt zakupu i serwisu.
Główne ograniczenia to:
- Brak naturalnej zdolności do poruszania się poza zdefiniowanymi osiami prostoliniowymi.
- Mniejsza wszechstronność w porównaniu do robotów przegubowych przy obsłudze skomplikowanych trajektorii.
- Duża przestrzeń wymagająca zabudowy linii prostej pod każdą z osi.
Nowe trendy i przyszłe kierunki rozwoju
Wraz z rozwojem sterowania i technologii czujników, roboty kartezjańskie stają się coraz bardziej inteligentne. Wdraża się rozwiązania z dziedziny przemysłu 4.0, takie jak:
- Integracja z systemami IoT – zdalny monitoring pracy i analiza wydajności.
- Algorytmy uczenia maszynowego – optymalizacja trajektorii na podstawie danych z czujników.
- Modułowe paletyzatory – łatwa rekonfiguracja stacji za pomocą wymiennych modułów.
- Współpraca z cobotami – hybrydowe rozwiązania łączące prostotę kartezjańską z elastycznością robotów współpracujących.
Nowoczesne systemy coraz częściej wykorzystują roboty kartezjańskie w połączeniu z wizją maszynową, co umożliwia autonomiczne wykrywanie pozycji i kształtu detali oraz dynamiczne dostosowanie działań. Dzięki temu zakres zastosowań będzie się rozszerzał, a koszty wdrożenia – spadały.











